
Al fine di ridurre i tempi di sviluppo , AMET ha avviato da tempo un processo di standardizzazione dei componenti hardware e degli applicativi software. La gestione a blocchi dei pacchetti hardware, consentita dalla modularità dei nostri sistemi meccanici, permette con poche varianti di far fronte alle molteplici esigenze dei clienti. L’utilizzo di sistemi di automazione sempre più voluti ci ha consentito di applicare facilmente questa operazione, sfruttando le enormi potenzialità dei sistemi di controllo, la compattezza dei dispositivi e la capacità di remotare ad alta velocità mediante protocolli Ethernet Real-time qualsiasi componente.
In ambito software, l’operazione di standardizzazione si è rivelata più complicata, ma l’enorme numero di applicazioni ad oggi realizzate ci ha consentito di trovare un minimo comune multiplo e definire uno standard anche in questa attività.
Oggi abbiamo normalizzato le seguenti procedure in merito alla gestione dei nostri robot cartesiani:
• Inserimento quote/target/missioni a terminale ed invio al controllo
• Caricamento percorsi tramite file esterno ( es. csv/xls)
• Acquisizione percorsi mediante bus di campo ( es. Powerlink, ControlNet, Profinet, Ethernet-IP, ModBUS TCP-IP)
• Esecuzione percorsi mediante conversione file DWG
• Esecuzioni missioni già precostituite e richiamo di esse dall’esterno
• Funzioni di jog
SOFTWARE DI PALLETTIZZAZIONE “PALLET MANAGER”

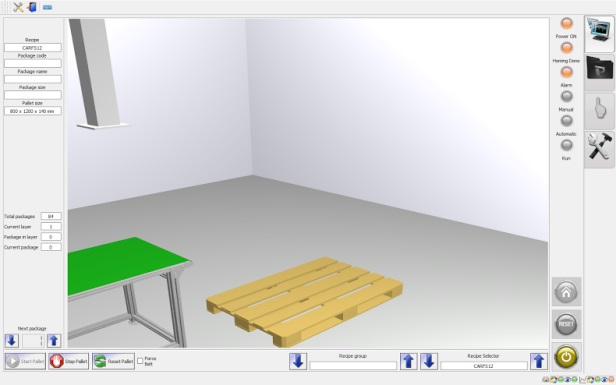
L’operatore, mediante una semplice ed intuitiva funzione “drag&drop”, potrà realizzare a video le geometrie del pallett. Durante l’esecuzione del ciclo l’operatore sarà in grado di seguire sul monitor la corretta esecuzione della ricetta, poiché il sistema sarà in grado di presentare il collo in movimento e la configurazione in tempo reale del posizionamento colli sul pallett.
Alcune caratteristiche del software:
Finestra di configurazione macchina.
• Inserimento a video delle dimensioni del pacco e definizione delle geometrie di posizionamento
• Possibilità di definire gli ingombri del gripper per i calcoli anticollisione e la validazione ricette
• Possibilità di configurare l’ingresso nastro a 3 posizioni e decidere come è orientato il pallet.
Una parte è dedicata all’autenticazione utente, selezionando uno dei vari utenti in lista e inserendo la relativa password si ha accesso a più o meno funzioni:
Utente Standard, può selezionare le ricette già create, fermare e fare partire la pallettizzazione, resettare allarmi accendere, spegnere, fare homing.
• Addetto alla manutenzione, può usare i movimenti in manuale.
• Addetto alle ricette, può creare, modificare, copiare, cancellare ricette.
• Addetto alla messa in servizio, può correggere limiti, posizioni e acquisire i punti.
• Amministratore, ha tutti i permessi
La modalità simulazione, se si hanno i privilegi per abilitarla, simula la creazione del bancale in tempo reale sfruttando gli assi teorici del CNC
Ovviamente tale modalità va attivata su un PC esterno, installando tutti gli applicativi, e consente di stimare il tempo di esecuzione di una “ricetta” in off-line.
In tale modalità si potrà simulare la pallettizzazione con rampe, velocità e tempi reali.
Ricette su database relazionale SQLite: permettono interazione diretta con software gestionale dei tipi più diffusi.