
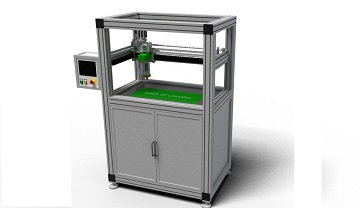
Sistema di movimentazione a 3 assi, costituito da 3 unità lineari con trasmissione a vite a ricircolo di sfere.
Precisione di lavoro 0,01 mm, velocità max 100 mm/sec.
Struttura di contenimento in profilo di alluminio.
Quadro elettrico alloggiato sotto il piano di lavoro e consolle HMI laterale
Controllo numerico per gestione assi B&R, servomotori B&R
SOLUZIONE A 3 ASSI COMPATTA
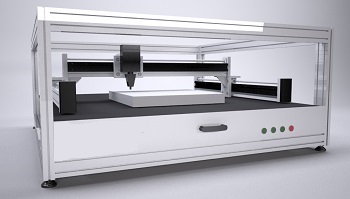
Sistema di movimentazione a 3 assi, costituito da 3 unità lineari con trasmissione cinghia/puleggia.
Precisione di lavoro 0,1 mm, velocità max 200 mm/sec.
Struttura di contenimento in profilo di alluminio.
Quadro elettrico alloggiato sotto il piano di lavoro
Controllo numerico per gestione assi B&R, motori stepper, unità HMI esterna su PC.
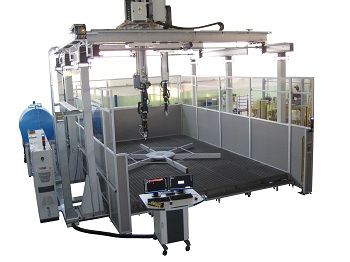
SISTEMA A 6 ASSI CARTESIANI – DOPPI ASSI YZ
Robot cartesiano a portale di grandi dimensioni, sviluppato totalmente con trasmissioni pignone/cremagliera.
Piantoni in scatolato elettrosaldato

SISTEMA A 4 ASSI CARTESIANI DOPPI ASSI VERTICALI INDIPENDENTI
Robot cartesiano di grandi dimensioni, costituito totalmente da assi lineari dotati di pignone e cremagliera a denti inclinati, guide con pattini a ricircolo di sfere e 2 assi indipendenti verticali. Struttura di sostegno in carpenteria pesante.

SOLUZIONE A 3 ASSI CARTESIANI A PORTALE MOBILE
Robot cartesiano a “portale mobile”, costituito da asse orizzontale X di corsa elevata con trasmissione pignone/cremagliera, e struttura semovente YZ dotata di moduli lineari cinghia/puleggia.

SOLUZIONE A 3 ASSI CARTESIANI CON ASSE A TERRA
Robot cartesiano dotato di 3 assi XYZ, costituito da asse orizzontale X di corsa elevata e variabile con trasmissione pignone/cremagliera, e assi verticali e trasversali con trasmissione cinghia puleggia.