
Robot cartesiani a 2 assi
ll dispositivo ad assi cartesiani mod. PL costituisce tradizionalmente l’architettura base di qualsiasi applicazione modello “plotter”: realizzato con 2 assi XY, è in grado ovviamente di lavorare sul piano e si presta a qualsiasi tipo di lavorazione, adattandosi pertanto ad un campo di applicazione vastissimo.
La possibilità di lavorare utilizzando interpolazioni lineari e circolari ne consente inoltre l’utilizzo in ambiti particolari, ove richiesta precisione ed esecuzione di percorsi specifici.

ROBOT A 2 ASSI CARTESIANI Mod. PP
Il modello PP rappresenta l’architettura classica utilizzata per realizzare i tradizionali “Pick&Place”. Realizzato mediante profili in alluminio strutturali, può essere dotato di trasmissione meccanica cinghia/puleggia oppure pignone/cremagliera, in funzione del tipo di applicazione e prestazioni che si vogliono
ottenere.
Per la sua classica configurazione è realizzabile di varie misure, e può essere sostenuto da piantoni in carpenteria oppure dotato di sostegni utili per essere integrato in un eventuale macchinario esistente.

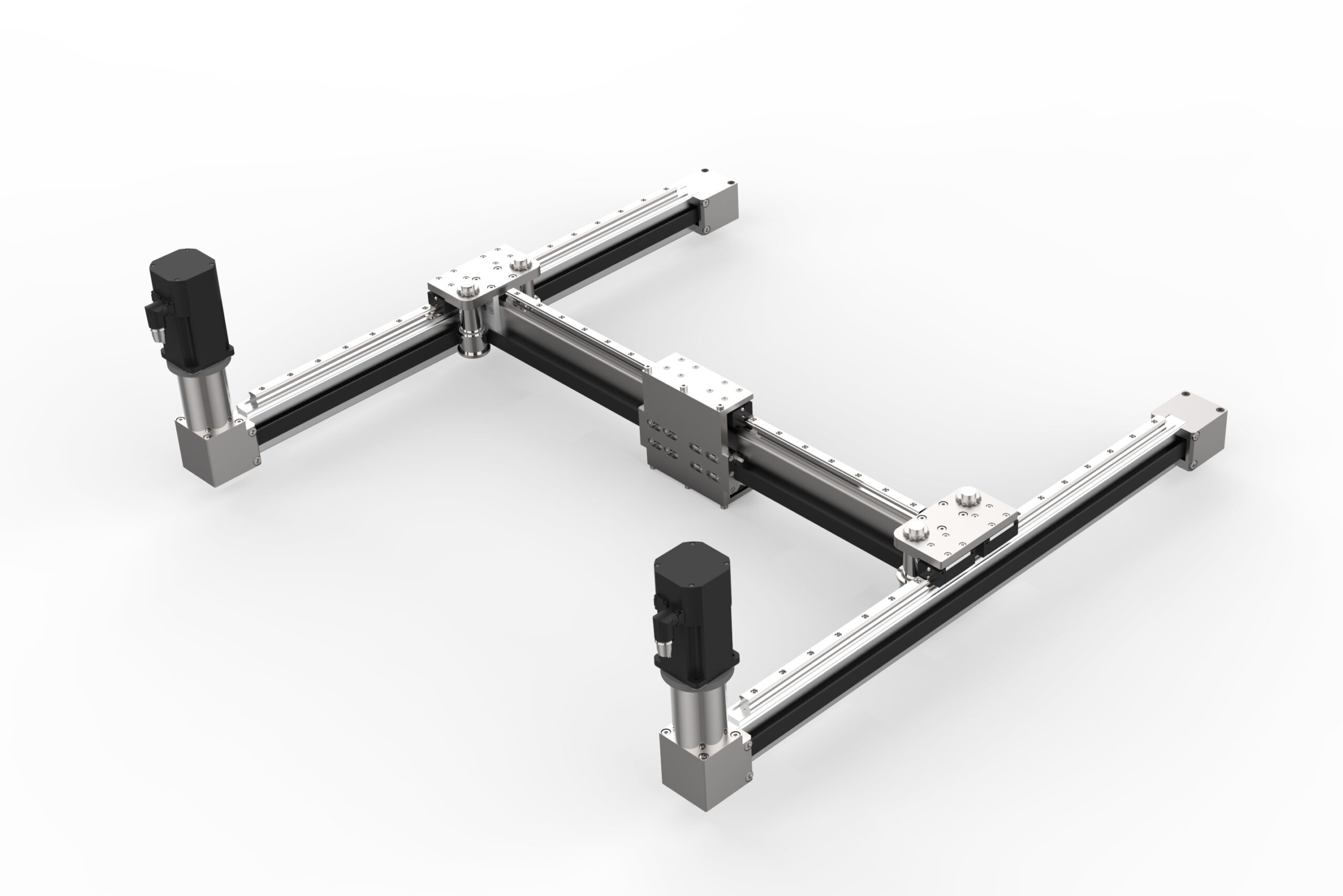
ROBOT A 2 ASSI CARTESIANI Mod. PPS
Il modello PPS è il più piccolo della serie a 2 assi AMET: dotato di un sistema di trasmissione cinghia/puleggia, mediante una particolare cinematica è movimentato da due motori in posizione fissa alle estremità dell’asse Y. Particolarmente indicato per operazioni di picking molto veloci ed in ambienti ristretti, il modello PPS è il pick&place ideale come accessorio di qualsiasi processo di montaggio e movimentazione di piccoli componenti, e molto indicato per operazioni di testing.
Eventualmente dotato di nastro trasportatore servocontrollato, può essere utilizzato anche per operazioni come il taglio al volo o inseguimento interpolato.

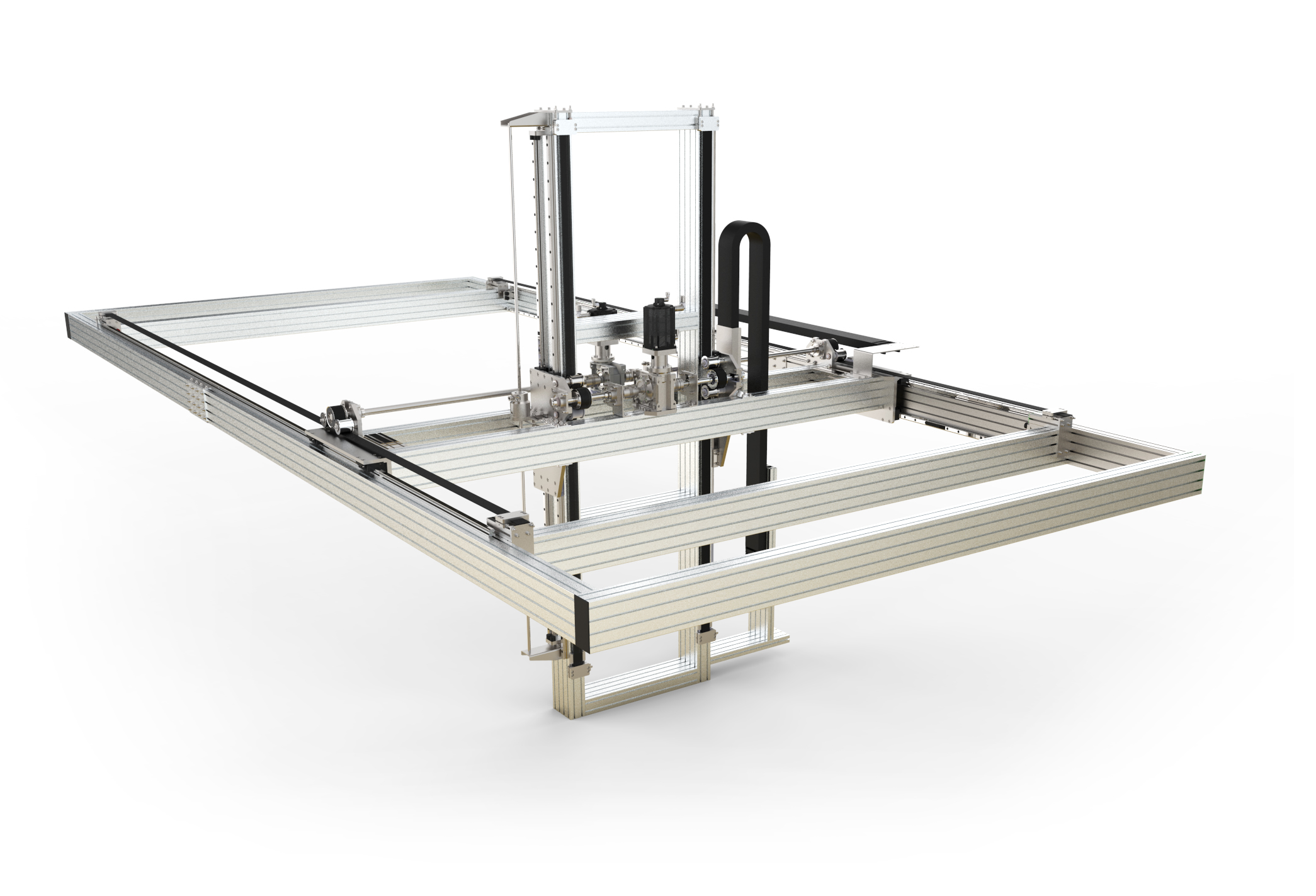
ROBOT A 2 ASSI CARTESIANI mod.PPV
Il sistema ad assi cartesiani mod.PPV, acronimo di “Pick&Place Verticale”, è la soluzione ideale per chi ha necessità di spostare secondo i due assi tradizionali Y e Z un componente ma è limitato dall’altezza dei locali, che non consentono di sviluppare l’asse in verticale per tutta la sua lunghezza.
Realizzato tradizionalmente con un sistema di trasmissione cinghia/puleggia, può essere attrezzato in modo tale da sopportare anche carichi a sbalzo e, dotato di più piantoni di supporto, svilupparsi su corse elevate.
ROBOT A 2 ASSI CARTESIANI mod.PO2
Il robot ad assi cartesiani mod.PO2 è a tutti gli effetti un Pick&Place a portale: è infatti spesso utilizzato per spostare componenti di grandi dimensioni (es. pannelli) in modo trasversale al fine di impilare o spostare da una postazione ad un’altra.
Dotato di trasmissione cinghia/puleggia o pignone/cremagliera per corse elevate, è un sistema in grado di sopportare carichi elevati e velocità sostenute, oltre ad avere una precisione di posizionamento all’altezza delle richieste più severe.
| Mod. PL | Mod. PP | Mod. PPS | Mod. PPV | Mod. PO2 | ||
| Corsa | Cx | fino a 2.000 mm | fino a 12.000 mm | fino a 1.500 mm | fino a 12.000 mm | fino a 12.000 mm |
| Cy | fino a 1.500 mm | fino a 1.000 mm | ||||
| Cz | fino a 2.500 mm | fino a 2.500 mm | fino a 2.500 mm | |||
| Velocità | X | 2 m/sec | 2,5 m/sec | 1 m/sec | 2 m/sec | 1,5 m/sec |
| Y | 2 m/sec | |||||
| Z | 1,5 m/sec | 1 m/sec | 1 m/sec | |||
| Accelerazione | X | 2 m/sec2 | 2,5 m/sec2 | 2 m/sec2 | 2 m/sec2 | 2 m/sec2 |
| Y | ||||||
| Z | 1,5 m/sec2 | 2 m/sec2 | 1,5 m/sec2 | |||
| Carico | 5 Kg | 25 Kg | 5 Kg | 100 Kg | 25 Kg | |
| Potenza installata | 3 Kw | 2,5 Kw | 1 Kw | 2,5 Kw | 2,5 Kw | |
| Precisione | +/-0,1 mm | +/-0,1 mm | +/-0,1 mm | +/-0,1 mm | +/-0,1 mm | |
- Foratrici automatiche
- Posizionatori
- Manipolatori
- Sistemi di trasporto
- Scaricatori
